Behavior programming
Programming Behavior with leJOS NXJ
When most people start programming
a robot, they think of the program flow as a series of if-thens,
which is remeniscent of structured programming (Figure 1). This
type of programming is very easy to get started in and hardly
requires any thought or design beforehand. A programmer can just
sit at the computer and start typing. The problem is, the code
ends up as spaghetti code; all tangled up and difficult to expand.
The behavior control model, in contrast, requires a little more
planning before coding begins, but the payoff is that each
behavior is nicely encapsulated within an easy to understand
structure. This will theoretically make your code easier to
understand by other programmers familiar with the behavior control
model, but more importantly it becomes very easy to add or remove
specific behaviors from the overall structure, without negative
repercussions to the rest of the code. Let's examine how to do
this in leJOS NXJ.
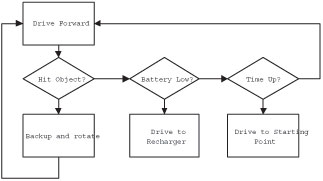
Figure 1: Structured programming visualized.
The Behavior API
The Behavior API is very simple,
and is composed of only one interface and one class. The Behavior
interface is used to define behaviors. The Behavior interface is
very general, so it works quite well because the individual
implementations of a behavior vary widely. Once all the Behaviors
are defined, they are given to an Arbitrator to regulate which
behaviors should be activated. All classes and interfaces for
Behavior control are located the lejos.subsumption package. The
API for the Behavior interface is as follows.
lejos.subsumption.Behavior
Returns a boolean value to indicate
if this behavior should become active. For example, if a touch
sensor indicates the robot has bumped into an object, this method
should return true.
The code in this method initiates
an action when the behavior becomes active. For example, if
takeControl() detects the robot has collided with an object, the
action() code could make the robot back up and turn away from the
object.
The code in the suppress() method
should immediately terminate the code running in the action()
method. The suppress() method can also be used to update any data
before this behavior completes.
As you can see, the three methods
in the Behavior interface are quite simple. If a robot has three
discreet behaviors, then the programmer will need to create three
classes, with each class implementing the Behavior interface. Once
these classes are complete, the code should hand the Behavior
objects off to the Arbitrator to deal with.
lejos.subsumption.Arbitrator
The constructor is:
public Arbitrator(Behavior [] behaviors)
Creates an Arbitrator object
that regulates when each of the behaviors will become active. The
higher the index array number for a Behavior, the
higher the priority level. Parameter: an array of Behaviors
Public Methods:
The Arbitrator class is even easier
to understand than Behavior. When an Arbitrator object is
instantiated, it is given an array of Behavior objects. Once it
has these, the start() method is called and it begins arbitrating;
deciding which behaviors should become active. The Arbitrator
calls the takeControl() method on each Behavior object, starting
with the object with the highest index number in the array. It
works its way through each of the behavior objects until it
encounters a behavior that wants to take control. When it
encounters one, it executes the action() method of that behavior
once and only once. If two behaviors both want to take control,
then only the higher level behavior will be allowed (Figure 2).
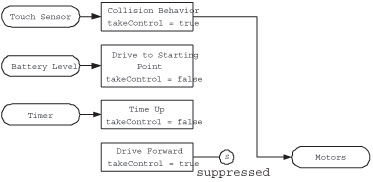
Figure 2: Higher level behaviors suppress lower level behaviors.
Coding Behaviors
Now that we are familiar with the
Behavior API under leJOS, let's look at a simple example using
three behaviors. For this example, we will program some behavior
for a simple robot with differential steering. This robot will
drive forward as it's primary low-level behavior. When it hits an
object, a high priority behavior will become active to back the
robot up and turn it 90 degrees. There will also be a third
behavior which we will insert into the program after the first two
have been completed. Let's start with the first behavior.
As we saw in the Behavior
interface, we must implement the methods action(), suppress(), and
takeControl(). The behavior for driving forward will take place in
the action() method. It simply needs to make motors A and C rotate
forward:
public void action() {
Motor.A.forward();
Motor.C.forward();
}
That was easy enough! Now the
suppress() method will need to stop this action when it is called,
as follows:
public void suppress() {
Motor.A.stop();
Motor.C.stop);
}
So far, so good. Now we need to
implement a method to tell Arbitrator when this Behavior should
become active. As we outlined earlier, this robot will drive
forward always, unless something else suppresses it, so this
Behavior should always want to take control (it's a bit of a
control freak). The takeControl() method should return true, no
matter what is happening. This may seem counter intuitive, but
rest assured that higher level behaviors will be able to cut in on
this behavior when the need arises. The method appears as follows:
public boolean takeControl() {
return true;
}
That's all it takes to define our
first Behavior to drive the robot forward. The complete code
listing for this class is as follows:
import lejos.subsumption.*;
import lejos.nxt.*;
public class DriveForward implements Behavior {
public boolean takeControl() {
return true;
}
public void suppress() {
Motor.A.stop();
Motor.C.stop();
}
public void action() {
Motor.A.forward();
Motor.C.forward();
}
}
The second behavior is a little
more complicated than the first, but still very similar. The main
action of this behavior is to reverse and turn when the robot
strikes an object. In this example, we would like the behavior to
take control only when the touch sensor strikes an object, so the
takeControl() method will be defined as follows:
public boolean takeControl() {
return touch.isPressed();
}
This assumes that a TouchSensor object has been created in an instance variable called touch.
For the action, we want the robot to back up
and rotate when it strikes an object, so we will define the
action() method as follows:
public void action() {
// Back up:
Motor.A.backward();
Motor.C.backward();
try{Thread.sleep(1000);}catch(Exception e) {}
// Rotate by causing one wheel to stop:
Motor.A.stop();
try{Thread.sleep(300);}catch(Exception e) {}
Motor.C.stop();
}
Defining the suppress() method for
this behavior is quite easy in this example. The action() method
above is the sort of method that runs very quickly (1.3 seconds)
and is usually high priority. We can either stop it dead by
stopping motor movement, or we could wait for it to complete the
backing up maneuver. To keep things simple, lets just stop the
motors from rotating:
public void suppress {
Motor.A.stop();
Motor.C.stop();
}
The complete listing for this behavior is as follows:
import lejos.subsumption.*;
import lejos.nxt.*;
public class HitWall implements Behavior {
public TouchSensor touch = new TouchSensor(SensorPort.S!);
public boolean takeControl() {
return touch.isPressed();
}
public void suppress() {
Motor.A.stop();
Motor.C.stop();
}
public void action() {
// Back up:
Motor.A.backward();
Motor.C.backward();
try{Thread.sleep(1000);}catch(Exception e) {}
// Rotate by causing only one wheel to stop:
Motor.A.stop();
try{Thread.sleep(300);}catch(Exception e) {}
Motor.C.stop();
}
}
We now have our two behaviors
defined, and it's a simple matter to make a class with a main()
method to get things started. All we need to do is create an array
of our Behavior objects, and instantiate and start the Arbitrator
as shown in the following code listing:
import lejos.subsumption.*;
public class BumperCar {
public static void main(String [] args) {
Behavior b1 = new DriveForward();
Behavior b2 = new HitWall();
Behavior [] bArray = {b1, b2};
Arbitrator arby = new Arbitrator(bArray);
arby.start();
}
}
The above code is fairly easy to
understand. The first two lines in the main() method create
instances of our Behaviors. The third line places them into an
array, with the lowest priority behavior taking the lowest array
index. The fourth line creates the Arbitrator, and the fifth line
starts the Arbitration process. When this program is started the
robot will scurry forwards until it bangs into an object, then it
will retreat, rotate, and continue with its forward movement until
the power is shut off.
This seems like a lot of extra work
for two simple behaviors, but now let's see how easy it is to
insert a third behavior without altering any code in the other
classes. This is the part that makes behavior control systems very
appealing for robotics programming. Our third behavior could be
just about anything. We'll have this new behavior monitor the
battery level and play a tune when it dips below a certain level.
Examine the completed Behavior:
import lejos.subsumption.*;
import lejos.nxt.*;
public class BatteryLow implements Behavior {
private float LOW_LEVEL;
private static final short [] note = {
2349,115, 0,5, 1760,165, 0,35, 1760,28, 0,13, 1976,23,
0,18, 1760,18, 0,23, 1568,15, 0,25, 1480,103, 0,18,
1175,180, 0,20, 1760,18, 0,23, 1976,20, 0,20, 1760,15,
0,25, 1568,15, 0,25, 2217,98, 0,23, 1760,88, 0,33, 1760,
75, 0,5, 1760,20, 0,20, 1760,20, 0,20, 1976,18, 0,23,
1760,18, 0,23, 2217,225, 0,15, 2217,218};
public BatteryLow(float volts) {
LOW_LEVEL = volts;
}
public boolean takeControl() {
float voltLevel = Battery.getVoltage();
System.out.println("Voltage " + voltLevel);
return voltLevel < LOW_LEVEL;
}
public void suppress() {
// Nothing to suppress
}
public void action() {
play();
try{Thread.sleep(3000);}catch(Exception e) {}
System.exit(0);
}
public static void play() {
for(int i=0;i <note.length; i+=2) {
final short w = note[i+1];
Sound.playTone(note[i], w);
try {
Thread.sleep(w*10);
} catch (InterruptedException e) {}
}
}
}
The complete tune is stored in the
note array at line 6 and the method to play the notes is at line
30. This behavior will take control only if the current battery
level is less the voltage specified in the constructor. The
takeControl() method looks a little inflated, and that's because
it also displays the battery charge to the LCD display. The
action() and suppress() methods are comparatively easy. Action
makes a bunch of noise, then exits the program as soon as it is
called. Since this behavior stops the program, there is no need to
create a suppress() method.
To insert this Behavior into our
scheme is a trivial task. We simply alter the code of our main
class as follows:
import lejos.subsumption.*;
public class BumperCar {
public static void main(String [] args) {
Behavior b1 = new DriveForward();
Behavior b2 = new BatteryLow(6.5f);
Behavior b3 = new HitWall();
Behavior [] bArray = {b1, b2, b3};
Arbitrator arby = new Arbitrator(bArray);
arby.start();
}
}
Note: The voltage level of the NXT
at rest is different from the voltage when in action. The voltage
level at rest might be 7.8 V, but when motors are activated they
naturally cause a drop in the voltage reading. Make sure the
voltage threshold used in the BatteryLow constructor is low
enough.
This example beautifully
demonstrates the real benefit of behavior control coding.
Inserting a new behavior, no matter what the rest of the code
looks like, is simple. The reason for this is grounded in object
oriented design; each behavior is a self contained, independent
object.
TIP: When creating a behavior
control system, it is best to program each behavior one at a time
and test them individually. If you code all the behaviors and then
upload them all at once to the NXT brick, there is a good chance a
bug will exist somewhere in the behaviors, making it difficult to
locate. By programming and testing them one at a time it makes it
easier to identify where the problem was introduced.
Behavior coding is predominantly
used for autonomous robots - robots that work independently, on
their own free will. A robot arm controlled by a human would
likely not use behavior programming, although it would be
possible. For example, a robot arm with four joystick movements
could have a behavior for each direction of movement. But as you
may recall, behaviors are ordered with the highest order taking
precedence over lower order behaviors. Who is to say that pushing
left on the joystick would take precedence over pushing up? In
other words, behavior control in anything other than autonomous
robots is largely overkill.
Back to Top
Advanced Behavior Coding
It would be nice if all behaviors
were as simple as the examples given above, but in more complex
coding there are some unexpected results that can sometimes be
introduced. Threads, for example, can sometimes be difficult to
halt from the suppress() method, which can lead to two different
threads fighting over the same resources - often the same motor!
Another problem that can potentially occur in multi-threaded
programs is that events go undetected, such as touch sensor hits.
These are a few of the pitfalls we will be examining in this
section. Let's start by looking at what is generally the least
complicated of the three Behavior methods to implement; the
takeControl() method.
Note: The behavior control API used
by leJOS NXJ is a modified version of the model proposed by Rodney
Brooks. His model is all done at the lowest level possible - the
motors. This prevents higher level classes from being used in
behaviors. For example, the Navigator class accesses the motors of
the NXT directly, so with the original behavior control model
Navigator could not be used. Also, if both motors are moving
forward, and a higher level behavior takes command it is not clear
if all lower level motor movements should be stopped. What if the
higher level behavior only uses one of the motors? Should the
other keep moving forward? And will this lead to odd behavior?
These are the problems the leJOS Behavior Control API tries to
address.
Coding bomb proof takeControl methods
It is important for takeControl()
methods to be responsive in behavior control systems. When a
bumper collides with an object, the robot must stop or reverse
direction immediately; otherwise it will continue to move forward
into the object. Sometimes when an event occurs, such as a touch
sensor press, the program misses the event because the NXT is
executing another thread. By the time it gets to the takeControl()
method the sensor has been released and the program misses its
opportunity to activate the proper behavior action. In this
section we will learn how to make fool-proof takeControl()
methods.
In the above example we used single
indicators of whether or not to take control. For example, it took
one reading from the Sensor class to check if the touch sensor was
hit. The takeControl() method can also make a decision to take
control based on a number of different values. It could initiate
an action if it is facing east, the light reading is greater than
60, and the temperature is less than 20 degrees:
public boolean takeControl() {
boolean pass = false;
if(direction == EAST)
if(light.readValue() > 60)
if(temperature.getCelcius() < 20)
pass = true;
return pass;
}
Likewise, a different behavior could just as easily check on the same data,
only react differently based on different values. For example,
another Behavior could initiate a different action if the robot is
facing west, the light reading is less than 60, and temperature is
greater than 20 degrees. So a robot can initiate an unlimited
number of responses with only a few sensors at its disposal. This
leads to another point about implementing the takeControl()
method.
With the Arbitrator cycling through
all the takeControl() methods, there could be a significant delay
in checking a condition, such as whether a touch sensor has been
tapped. It's a feature of the imperfect world we live in that,
when the robot strikes an object, the touch sensor may not remain
pressed. It sometimes bounces off the object into a position where
the bumper is no longer pressing on the touch sensor. You may have
noticed in the example that it relies on checking touch very
often. What if the touch sensor is momentarily activated, but the
Arbitrator misses this fact? The solution is to use a
SensorListener, and have it set a flag to indicate the event has
occurred. Let's take the HitWall Behavior from the example above
and modify it so it uses a SensorListener:
import lejos.subsumption.*;
import lejos.nxt.*;
public class HitWall implements Behavior, SensorPortListener {
boolean hasCollided;
TouchSensor bumper = new TouchSensor(SensorPort.S1);
// Constructor:
public HitWall() {
hasCollided = false;
SensorPort.S2.addSensorPortListener(this);
}
public void stateChanged(SensorPort port, int oldValue, int newValue) {
if(bumper.isPressed())
hasCollided = true;
}
public boolean takeControl() {
if(hasCollided) {
hasCollided = false; // reset value
return true;
} else
return false;
}
public void suppress() {
Motor.A.stop();
Motor.C.stop();
}
public void action() {
// Back up:
Motor.A.backward();
Motor.C.backward();
try{Thread.sleep(1000);}catch(Exception e) {}
// Rotate by causing only one wheel to stop:
Motor.A.stop();
try{Thread.sleep(300);}catch(Exception e) {}
Motor.C.stop();
}
}
The above code implements a SensorPortListener, and hence implements
the stateChanged() method. It is important to add the sensor
listener to SensorPort.S2, as shown in line 11. Notice the
stateChanged() method does not simply return the value of the
bumper Sensor; rather, if the Sensor value is true then it changes
the hasCollided variable to true. If, on the next pass, the sensor
value is false then hasCollided will remain true until
takeControl() has seen the hasCollided value. Once takeControl()
sees there has been a collision, then hasCollided is reset back to
false (line 20). With this new code, it should be
impossible for the robot to miss any collisions with the bumper!
Coding Solid action and suppress methods
In order to code functional action() and suppress() pairs, it is necessary to understand how
arbitration works. Arbitrator cycles through each of its
Behaviors, checking the takeControl() method to see if the
action() for the Behavior should be executed. It starts with the
highest priotiry method and goes down to the lowest priority
Behavior. As soon as it comes across a behavior that wants to take
control, it executes suppress() for the previous Behavior
(assuming it is not a higher level thread), then runs the action()
method for the current Behavior. As soon as the action() method
returns, it then starts looping again, checking each behavior. If
the takeControl() from the previous Behavior continues to say
true, it does not run action() again. This is important; a single
Behavior can not be executed twice in a row. If it could, it would
constantly be suppressing itself. If Arbitrator moves on to
another Behavior, when that behavior completes then it will call
action on the lower level behavior again.
Note: If you would like to remove
any mystery about what goes on in the Arbitrator class, take a
look at the source code located in
src/classes/lejos/subsumption/Arbitrator.java.
To program individual behaviors it
is important to understand the fundamental differences between
types of behaviors. Behavior actions come in two basic varieties:
Discrete actions which finish quickly (e.g. back up and turn)
Actions that start running and keep going
an indefinite period until they are suppressed (e.g. driving
forward, following a wall).
One final word of advice. Discrete
actions execute once and return from the action() method call only
when it has completed its behavior. These types of Behaviors
generally do not need any code in the suppress() method because
once the action is done there is nothing to suppress. The second
type of action sometimes runs in a separate thread, although not
always. For example, the Motor.A.forward() method call acts like a
thread because the motor keeps turning after the method returns.
In actuality, this is not a thread; the RCX just turns on an
internal switch to activate the motor. An example of a true thread
would be complex behavior, such as wall following. The action()
method could start a thread to begin following a wall until the
suppress() method is called. Be careful of never ending loops! If
one were to occur within the action() method then the program
would become stuck.
Summary
So why use the Behavior API? The
best reason is because in programming we strive to create the
simplest, most powerful solution possible, even if it takes
slightly more time. The importance of reusable, maintainable code
has been demonstrated repeatedly in the workplace, especially on
projects involving more than one person. If you leave your code
and come back to it several months later, the things that looked
so obvious suddenly don't anymore. With Behavior control, you can
add and remove behaviors without even looking at the rest of the
code, even if there are 10 or more bahaviors in the program.
Another big plus of behavior control is programmers can exchange
Behaviors with each other easily, which fosters code reusability.
Hundreds of interesting, generic behaviors could be uploaded to
websites, and you could simply pick the behaviors you want to add
to your robot (assuming your robot is the correct type of robot).
This reusability of code can be taken forward even more by using
standard leJOS NXJ classes such as the Navigation API.
Back to Top
| 
